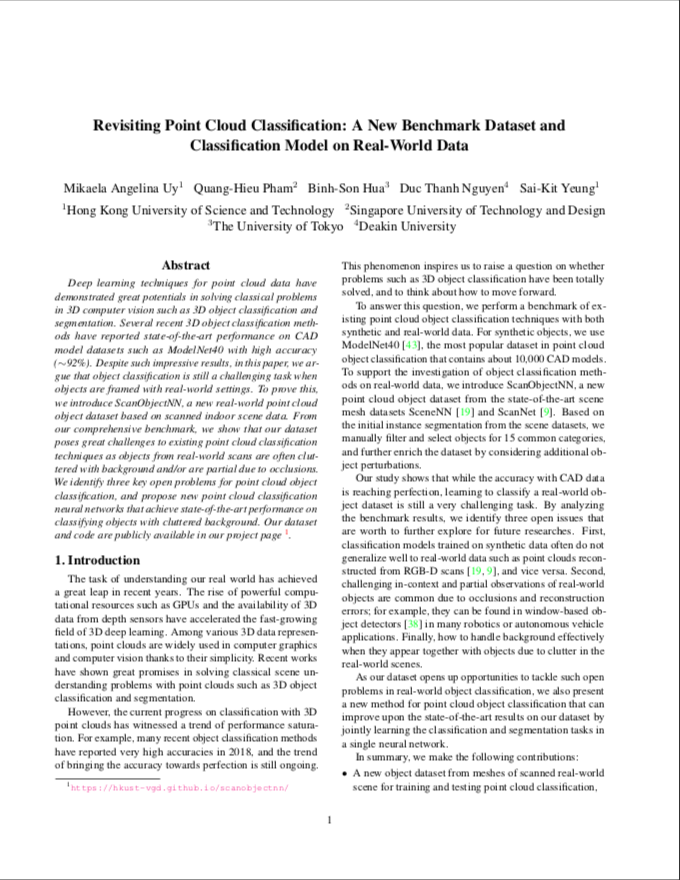
Revisiting Point Cloud Classification: A New Benchmark Dataset and Classification Model on Real-World Data
Mikaela Angelina Uy1 Quang-Hieu Pham2 Binh-Son Hua3 Duc Thanh Nguyen4 Sai-Kit Yeung1
1Hong Kong University of Science and Technology
2Singapore University of Technology and Design
3The University of Tokyo
4Deakin University
International Conference on Computer Vision (ICCV), 2019 (Oral)

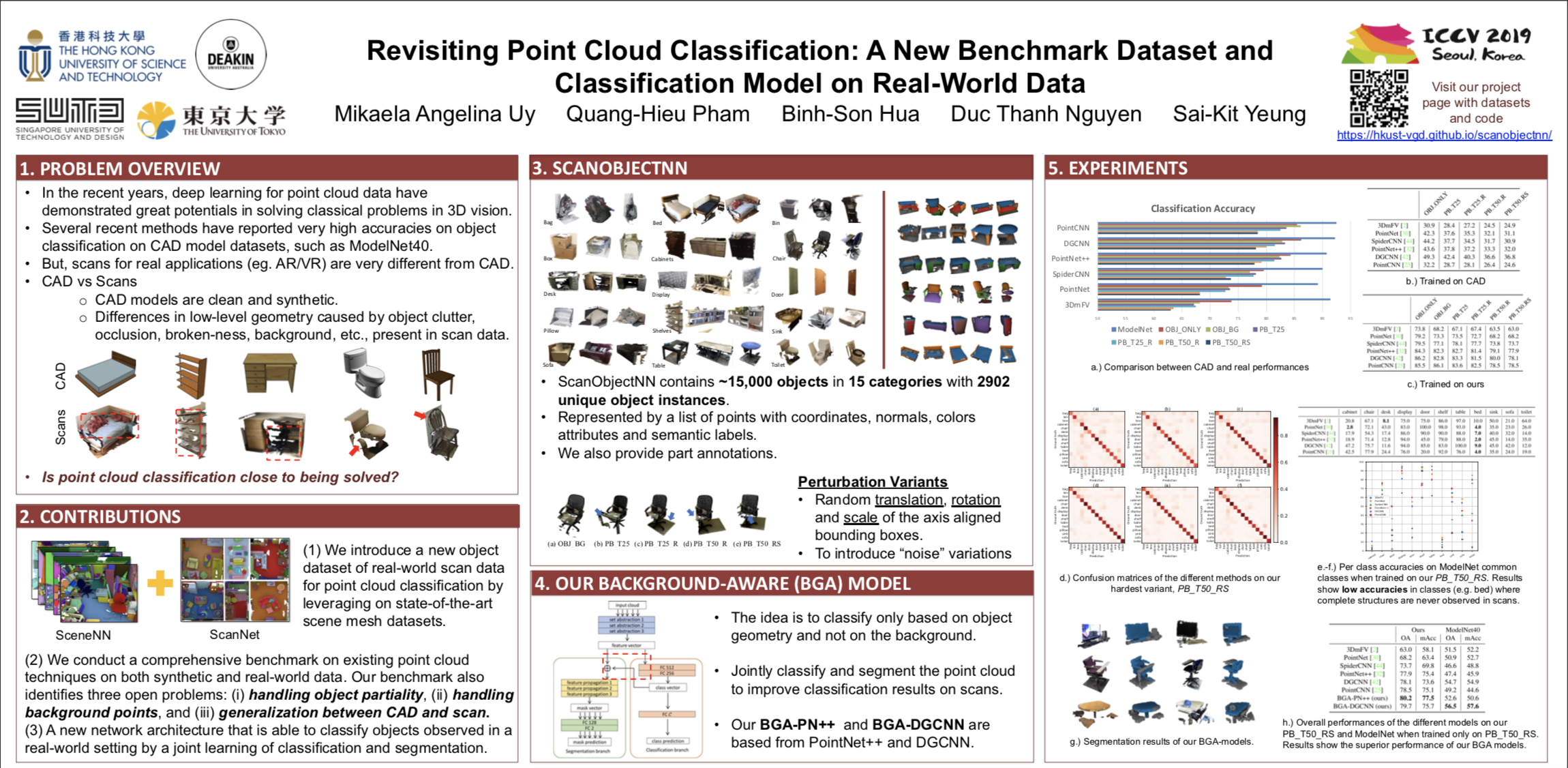
Benchmark
| Method | overall acc. | avg acc. | bag | bin | box | cabinet | chair | desk | display | door | shelf | table | bed | pillow | sink | sofa | toilet |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 3DmFV | 63.0 | 58.1 | 39.8 | 62.8 | 15.0 | 65.1 | 84.4 | 36.0 | 62.3 | 85.2 | 60.6 | 66.7 | 51.8 | 61.9 | 46.7 | 72.4 | 61.2 |
| PointNet | 68.2 | 63.4 | 36.1 | 69.8 | 10.5 | 62.6 | 89.0 | 50.0 | 73.0 | 93.8 | 72.6 | 67.8 | 61.8 | 67.6 | 64.2 | 76.7 | 55.3 |
| SpiderCNN | 73.7 | 69.8 | 43.4 | 75.9 | 12.8 | 74.2 | 89 | 65.3 | 74.5 | 91.4 | 78 | 65.9 | 69.1 | 80 | 65.8 | 90.5 | 70.6 |
| PointNet++ | 77.9 | 75.4 | 49.4 | 84.4 | 31.6 | 77.4 | 91.3 | 74 | 79.4 | 85.2 | 72.6 | 72.6 | 75.5 | 81 | 80.8 | 90.5 | 85.9 |
| DGCNN | 78.1 | 73.6 | 49.4 | 82.4 | 33.1 | 83.9 | 91.8 | 63.3 | 77 | 89 | 79.3 | 77.4 | 64.5 | 77.1 | 75 | 91.4 | 69.4 |
| PointCNN | 78.5 | 75.1 | 57.8 | 82.9 | 33.1 | 83.6 | 92.6 | 65.3 | 78.4 | 84.8 | 84.2 | 67.4 | 80 | 80 | 72.5 | 91.9 | 71.8 |
| BGA-PN++ | 80.2 | 77.5 | 54.2 | 85.9 | 39.8 | 81.7 | 90.8 | 76 | 84.3 | 87.6 | 78.4 | 74.4 | 73.6 | 80 | 77.5 | 91.9 | 85.9 |
| BGA-DGCNN | 79.7 | 75.7 | 48.2 | 81.9 | 30.1 | 84.4 | 92.6 | 77.3 | 80.4 | 92.4 | 80.5 | 74.1 | 72.7 | 78.1 | 79.2 | 91 | 72.9 |
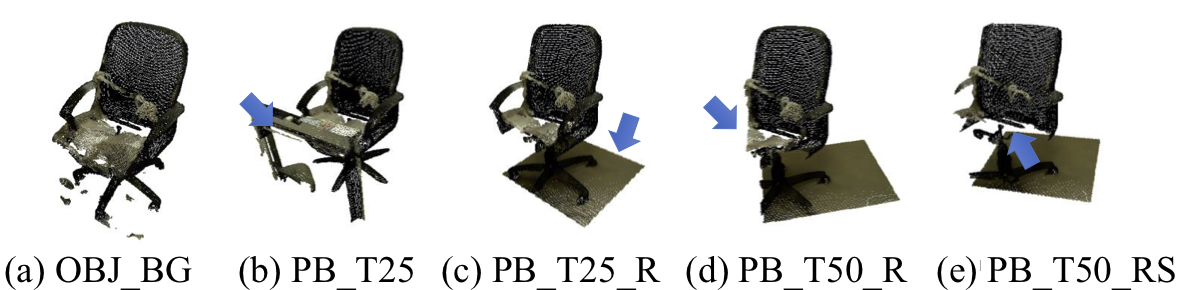
Leaderboard shows the classification accuracy for our hardest variant, PB_T50_RS. Researchers who want to add results on our dataset to this leaderboard, please visit our 3D Scene Understanding Benchmark page and submit your predictions there.
Materials
Dataset:
If you would like to download the ScanObjectNN data, please fill out an agreement to the "ScanObjectNN Terms of Use" to get the download link.
It should be noted that the processed and raw data sizes are 13 GB and 197 GB, respectively.
Citation
@inproceedings{uy-scanobjectnn-iccv19,
title = {Revisiting Point Cloud Classification: A New Benchmark Dataset and Classification Model on Real-World Data},
author = {Mikaela Angelina Uy and Quang-Hieu Pham and Binh-Son Hua and Duc Thanh Nguyen and Sai-Kit Yeung},
booktitle = {International Conference on Computer Vision (ICCV)},
year = {2019}
}Acknowledgements
We would like to sincerely thank Tan Sang Ha, Fan Wai Shan, Xu Ting Ting, Loh Pei Huan, Luong Van An, Ng Shi Xian Bryden, Li Jingxin and Chiz Huang for helping in the part annotations.
This research project is partially supported by an internal grant from HKUST (R9429).